[Scienza delle Costruzioni] ESERCIZIO
09/01/2024, 15:34
Salve ho riscontrato "problemi" nella risoluzione in un esercizio di cui vi metto il testo qui sotto.

il dubbio è su come svolgerlo....
mi sembra chiaro che sia un caso cinematico ma non so come considerare la molla in questo caso.
spero mi possiate aiutare.
Grazie in anticipo

il dubbio è su come svolgerlo....
mi sembra chiaro che sia un caso cinematico ma non so come considerare la molla in questo caso.
spero mi possiate aiutare.
Grazie in anticipo
Re: [Scienza delle Costruzioni] ESERCIZIO
09/01/2024, 16:18
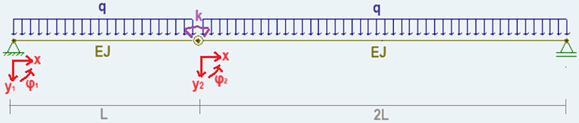
Assegnata la seguente struttura isostatica:
ricordando le formulazioni del modello di trave alla Eulero-Bernoulli: \[
\varphi(x) = -y'(x),
\quad \quad
M(x) = -EJ\,y''(x),
\quad \quad
T(x) = -EJ\,y'''(x),
\quad \quad
q(x) = EJ\,y''''(x)
\] e ricordando che per le molle ideali vale la legge di Hooke: \[
T = k_t\,\Delta y \; (\text{molle traslazionali}),
\quad \quad
M = k_r\,\Delta \varphi \; (\text{molle rotazionali})
\] si richiede la determinazione della funzione spostamento, ossia della linea elastica: \[
y(x) =
\begin{cases}
y_1(x) & \text{se} \; 0 \le x \le L \\
y_2(x) & \text{se} \; L \le x \le 3L \\
\end{cases}
\] e successivamente si richiede di graficarla, ossia di tracciare la deformata elastica.
ricordando le formulazioni del modello di trave alla Eulero-Bernoulli: \[
\varphi(x) = -y'(x),
\quad \quad
M(x) = -EJ\,y''(x),
\quad \quad
T(x) = -EJ\,y'''(x),
\quad \quad
q(x) = EJ\,y''''(x)
\] e ricordando che per le molle ideali vale la legge di Hooke: \[
T = k_t\,\Delta y \; (\text{molle traslazionali}),
\quad \quad
M = k_r\,\Delta \varphi \; (\text{molle rotazionali})
\] si richiede la determinazione della funzione spostamento, ossia della linea elastica: \[
y(x) =
\begin{cases}
y_1(x) & \text{se} \; 0 \le x \le L \\
y_2(x) & \text{se} \; L \le x \le 3L \\
\end{cases}
\] e successivamente si richiede di graficarla, ossia di tracciare la deformata elastica.
Re: [Scienza delle Costruzioni] ESERCIZIO
10/01/2024, 17:40
Grazie mille!!!
Re: [Scienza delle Costruzioni] ESERCIZIO
10/01/2024, 23:34
Prego! Quindi, cosa ti risulta? Non essendo del tutto banale te lo commento.
Si tratta di integrare un sistema di due equazioni differenziali ordinarie: \[
y_1''''(x) = \frac{q}{EJ},
\quad \quad \quad
y_2''''(x) = \frac{q}{EJ}
\] che necessitano di essere accompagnate da \(4+4\) condizioni al contorno:
Si tratta di integrare un sistema di due equazioni differenziali ordinarie: \[
y_1''''(x) = \frac{q}{EJ},
\quad \quad \quad
y_2''''(x) = \frac{q}{EJ}
\] che necessitano di essere accompagnate da \(4+4\) condizioni al contorno:
- in \(x=0\) c'è una cerniera vincolata a terra, quindi \(y_1(0)=0\), \(M_1(0)=0\);
- in \(x=3L\) c'è un carrello vincolato a terra, quindi \(y_2(3L)=0\), \(M_2(3L)=0\);
- in \(x=L\) c'è un incastro interno, quindi: \(T_1(L)=T_2(L)\), \(M_1(L)=M_2(L)\);
- in \(x=L\) se vi fosse un incastro perfetto: \(y_1(L)=y_2(L)\), \(\varphi_1(L) = \varphi_2(L)\);
- in \(x=L\) se vi fosse un incastro cedevole elasticamente sia alla traslazione che
alla rotazione: \(T_1(L) = k_t\left(y_2(L)-y_1(L)\right)\), \(M_1(L) = k_r\left(\varphi_2(L)-\varphi_1(L)\right)\); - in \(x=L\), quindi, occorre imporre \(y_1(L)=y_2(L)\), \(M_1(L) = k_r\left(\varphi_2(L)-\varphi_1(L)\right)\).
Skuola.net News è una testata giornalistica iscritta al Registro degli Operatori della Comunicazione.
Registrazione: n° 20792 del 23/12/2010.
©2000—
Skuola Network s.r.l. Tutti i diritti riservati. — P.I. 10404470014.
Powered by phpBB © phpBB Group - Privacy policy - Cookie privacy
phpBB Mobile / SEO by Artodia.